 Barres
Barres
 Perles et sphères
Perles et sphères
 Boulons et écrous
Boulons et écrous
 Creusets
Creusets
 Disques
Disques
 Fibres et tissus
Fibres et tissus
 Films
Films
 Flocon
Flocon
 Mousses
Mousses
 Feuille d'aluminium
Feuille d'aluminium
 Granulés
Granulés
 Nids d'abeilles
Nids d'abeilles
 Encre
Encre
 Stratifié
Stratifié
 Grumeaux
Grumeaux
 Mailles
Mailles
 Film métallisé
Film métallisé
 Assiette
Assiette
 Poudres
Poudres
 Tige
Tige
 Feuilles
Feuilles
 Cristaux simples
Cristaux simples
 Cible de pulvérisation
Cible de pulvérisation
 Tubes
Tubes
 Laveuse
Laveuse
 Fils
Fils
 Convertisseurs et calculatrices
Convertisseurs et calculatrices
 Écrire pour nous
Écrire pour nous
Projets précédents - Prototype de robot mobile
Dans cet article, j'aimerais parler de mon précieux projet - un prototype de robot mobile que j'ai conçu avec une équipe d'autres étudiants en ingénierie dans le cadre de mon cours d'ENED (enseignement de l'ingénierie). Les spécificités du projet demandaient un prototype de robot mobile (PMR) capable de ramasser une charge d'un certain matériau, d'identifier ce matériau en fonction de son poids, puis de livrer ce matériau à sa station de mise au rebut particulière au sein d'une installation. On nous a seulement demandé de présenter un prototype sur papier pour le cours, car la construction d'un prototype était logistiquement impossible en raison de la pandémie de COVID-19. Cependant, même avec un prototype papier, notre équipe a dû réfléchir aux matériaux que nous utilisions et aux effets que ces matériaux auraient sur la construction finale.
Dans notre cours d'ingénierie, on nous a demandé d'utiliser un logiciel de rendu spécifique appelé BrickLinks pour créer des images du prototype physique du robot. BrickLinks est un logiciel qui permet aux utilisateurs de créer des objets avec des briques LEGO et, par conséquent, le prototype que nous avons créé, s'il était construit, le serait avec des briques LEGO. Toutes les briques et pièces LEGO sont fabriquées dans un type de plastique très résistant appelé acrylonitrile butadiène styrène (ABS).1 Il était important que le robot soit fabriqué dans un plastique résistant, car il devait être suffisamment léger pour que le moteur situé sur son dos puisse l'alimenter efficacement, mais il devait également être suffisamment résistant pour contenir les conteneurs de matériaux afin qu'il puisse les identifier en fonction de leur poids. De plus, les jambes de la PMR devaient être conçues en tenant compte des obstacles, et les pneus n'étaient pas autorisés. Pour cette raison, notre équipe a décidé d'utiliser une pièce LEGO en caoutchouc fabriquée dans le même matériau que les pneus LEGO, mais sans l'axe au milieu. LEGO utilise un produit en caoutchouc très similaire au caoutchouc utilisé dans les vrais pneus,2 qui est une combinaison de caoutchouc butadiène, de caoutchouc styrène et de caoutchouc naturel.3 Nous avons spécifiquement fabriqué les pieds de la PMR dans un matériau en caoutchouc, afin qu'ils aident le prototype à être plus stable sur un sol inégal et un terrain difficile ou accidenté. Les pieds étaient également montés sur des pivots qui leur permettaient d'osciller d'avant en arrière, ce qui permettait au robot de garder une position ferme dans des circonstances irrégulières.
Pour mieux expliquer la conception : le PMR suivrait une ligne peinte sur le sol d'un entrepôt, sachant quand tourner à droite ou à gauche grâce aux capteurs de lumière situés de chaque côté (la décision de baser la mobilité du PMR sur une ligne peinte sur le sol n'était pas la nôtre, mais une stipulation qui nous a été imposée). Le cerveau du robot est logé dans la console LEGO qu'il a montée sur son dos et qui sert également de moteur pour les six jambes. L'avant est équipé d'un système de poulies qui aide le robot à ramasser les bacs de matériaux. L'aspect actuel du PMR a été inspiré par les araignées et le fonctionnement de leurs pattes, car nous devions baser notre conception sur la façon de marcher d'un animal, conformément aux directives de la classe.
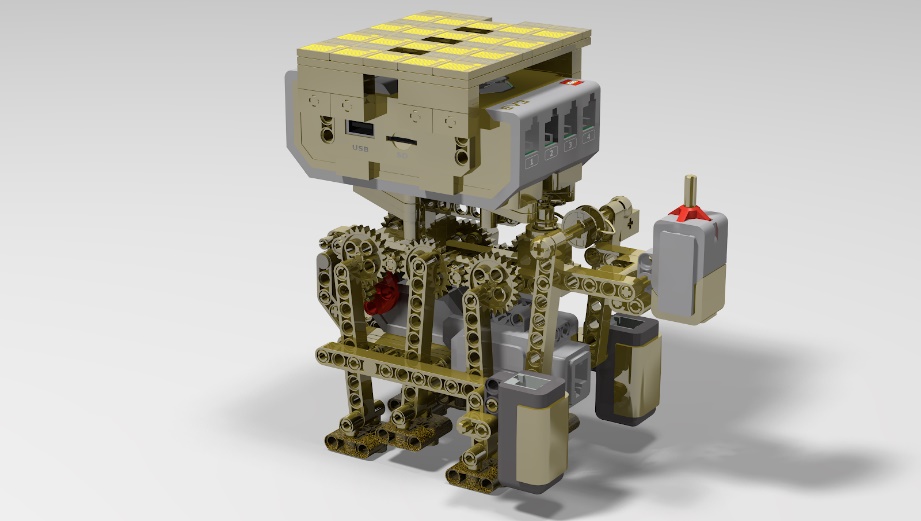
Vous trouverez ci-joint le rendu final du robot dans le logiciel BrickLinks. Comme le montre l'image, le robot devait être fabriqué dans un matériau suffisamment solide pour supporter non seulement le servo et le moteur situés en haut du robot, mais aussi les deux capteurs de lumière situés en bas à l'avant. Le matériau de la PMR devait également être suffisamment souple pour supporter le système de poulies à l'avant, qui devait pouvoir se mettre à la verticale et à l'horizontale pour prendre les bacs de matériaux, mesurer leur poids et les transporter jusqu'à leur destination. Heureusement, le plastique LEGO ordinaire couvre tous les aspects dont nous avions besoin, de sorte que le robot n'a pas eu besoin d'être construit avec des pièces spéciales ou des pièces imprimées en 3D, à l'exception des pieds. Le plastique est parfait pour le châssis et la poulie du PMR, mais il est très rigide et pas du tout flexible ou élastique. Cela signifie que des pieds en plastique LEGO ne conviendraient pas sur un terrain accidenté ou difficile, ce qui était indispensable pour notre projet. C'est pourquoi l'équipe a décidé de se tourner vers un matériau plus souple. Finalement, nous avons décidé d'utiliser les dimensions d'une petite version de la pièce utilisée pour les jambes du robot, mais fabriquée en caoutchouc de pneu LEGO. Cette pièce doit être fabriquée sur mesure, mais elle est relativement petite et seules 6 pièces sont nécessaires. Les pièces des pieds seraient ensuite placées sur un axe tournant à près de 90 degrés, afin que le robot puisse ajuster son adhérence lorsqu'il franchit des sols irréguliers ou des obstacles.
En fin de compte, les matériaux avancés utilisés pour ce projet étaient un mélange de caoutchouc synthétique et naturel et de plastique ABS. Le plastique a contribué à la rigidité du corps du robot, tout en lui permettant de conserver un certain niveau de flexibilité pour son système de transport. Le caoutchouc a été utilisé pour augmenter la traction du robot et lui donner la capacité de marcher efficacement sur des terrains difficiles.
Bibliographie :
- Pickering, David (1999). The Ultimate LEGO Book. New York : Dorling Kindersley. ISBN 0-7894-4691-X.
- Threewitt, C. (2020, 11 septembre). You'll never guess what company makes the world's most tires. https://entertainment.howstuffworks.com/lego-tires.htm.
- S. Tire Manufacturers Association. (2020). What's in a tire. What's In a Tire | USTMA. https://www.ustires.org/whats-tire-0#:~:text=The%20two%20main%20synthetic%20rubber,in%20combination%20with%20natural%20rubber.
Note : L'article est une soumission pour la bourse Stanford Advanced Materials College Scholarship 2021.
Juan Ignacio Alvarado
Bourse Stanford Advanced Materials
Université de Cincinnati
 Chin Trento
Chin Trento



